Lane detection
January 1, 2023
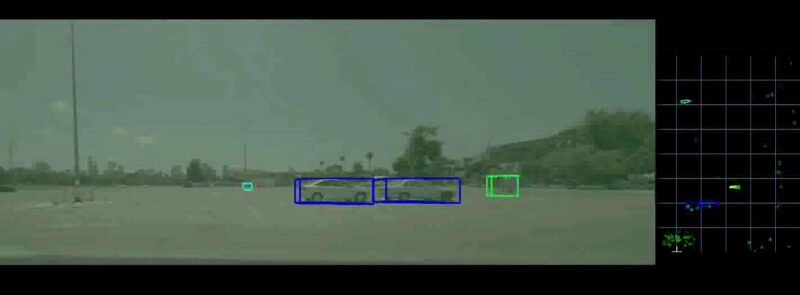
LeddarVision demonstrates performance w.r.t ego-lane detection and closest in-path vehicle detection. Achieving detection at over 150m using a low-cost sensor architecture of 1.2Mpx camera and 2 corner radar.
LeddarTech develops and provides comprehensive perception software solutions that enable the deployment of ADAS and autonomous driving applications. Explore this video gallery to learn about LeddarTech's technology, products, performance highlights and much more.
LeddarVision demonstrates performance w.r.t ego-lane detection and closest in-path vehicle detection. Achieving detection at over 150m using a low-cost sensor architecture of 1.2Mpx camera and 2 corner radar.
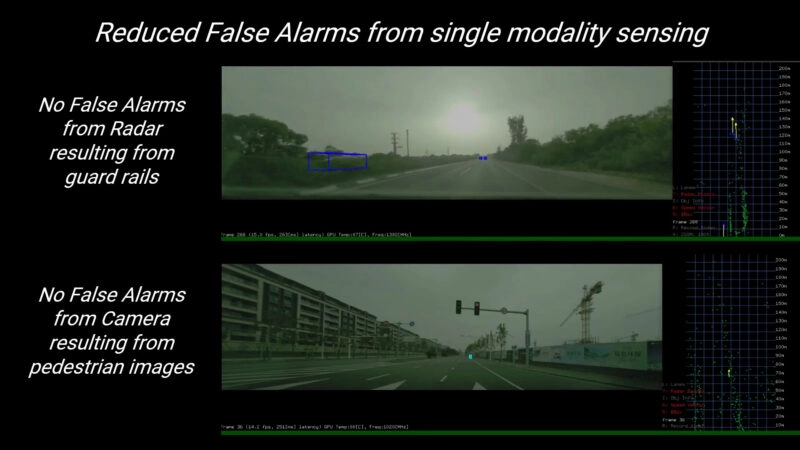
False alarms are one of the closely monitored key performance indicators when evaluating a perception system. False positive refers to detecting an object that doesn’t actually exist, while false negative refers to not detecting an object that does exist. In both cases, false alarms could be fatal. In this video, watch how LeddarVision handles false…
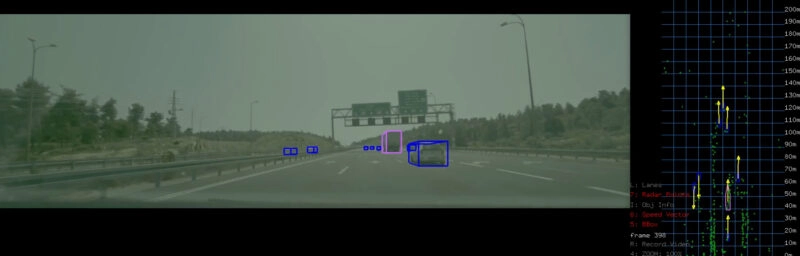
The LeddarTech video showcases their innovative technology known as “Object Separation on Highway.” This cutting-edge system is designed to address challenges related to identifying and differentiating objects on highways. Through advanced sensor technology and sophisticated data analysis, the technology enables accurate separation and classification of objects in high-speed highway environments. The video highlights how…